
API and Documentation
Composing Random Variables
Core to Edward’s design is compositionality. Compositionality enables fine control of modeling, where models are represented as a collection of random variables.
We outline how to write popular classes of models using Edward: directed graphical models, neural networks, Bayesian nonparametrics, and probabilistic programs. For more examples, see the model tutorials.
Directed Graphical Models
Graphical models are a rich formalism for specifying probability distributions (Koller & Friedman, 2009). In Edward, directed edges in a graphical model are implicitly defined when random variables are composed with one another. We illustrate with a Beta-Bernoulli model, \[p(\mathbf{x}, \theta) = \text{Beta}(\theta\mid 1, 1) \prod_{n=1}^{50} \text{Bernoulli}(x_n\mid \theta),\] where \(\theta\) is a latent probability shared across the 50 data points \(\mathbf{x}\in\{0,1\}^{50}\).
from edward.models import Bernoulli, Beta
theta = Beta(1.0, 1.0)
x = Bernoulli(probs=tf.ones(50) * theta)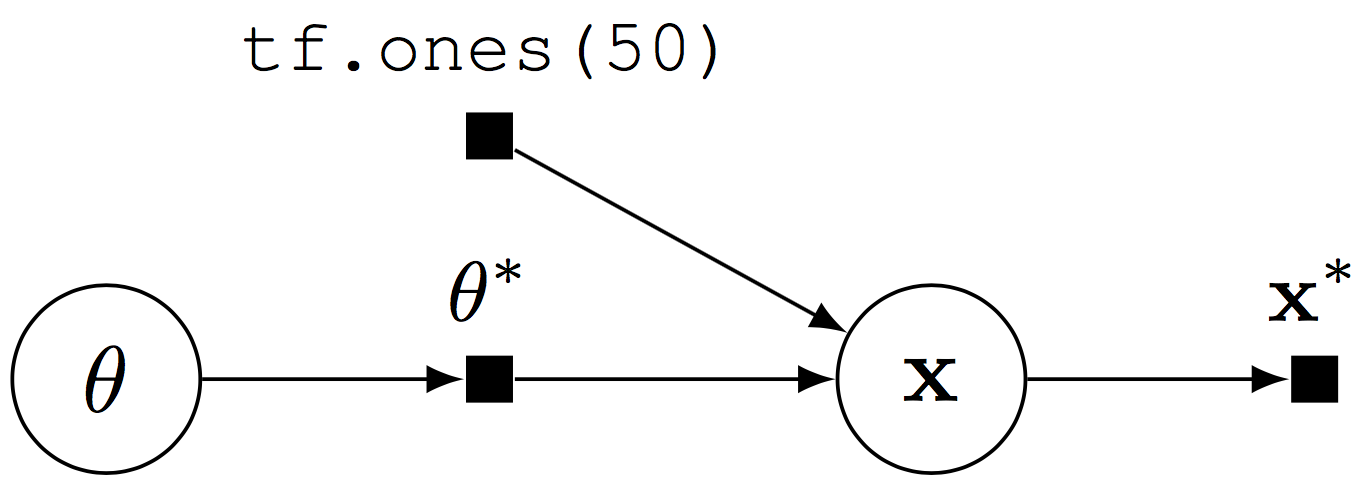
Computational graph for a Beta-Bernoulli program.
The random variable x (\(\mathbf{x}\)) is 50-dimensional, parameterized by the random tensor \(\theta^*\). Fetching x from a session runs the graph: it simulates from the generative process and outputs a binary vector (\(\mathbf{x}^*\)) of \(50\) elements.
With computational graphs, it is also natural to build mutable states within the probabilistic program. As a typical use of computational graphs, such states can define model parameters, that is, parameters that we will always compute point estimates for and not be uncertain about. In TensorFlow, this is given by a tf.Variable.
from edward.models import Bernoulli
theta = tf.Variable(0.0)
x = Bernoulli(probs=tf.ones(50) * tf.sigmoid(theta))Another use case of mutable states is for building discriminative models \(p(\mathbf{y}\mid\mathbf{x})\), where \(\mathbf{x}\) are features that are input as training or test data. The program can be written independent of the data, using a mutable state (tf.placeholder) for \(\mathbf{x}\) in its graph. During training and testing, we feed the placeholder the appropriate values. (See the Bayesian linear regression tutorial as an example.)
Neural Networks
As Edward uses TensorFlow, it is easy to construct neural networks for probabilistic modeling (Rumelhart, McClelland, & Group, 1988). For example, one can specify stochastic neural networks (Neal, 1990); see the Bayesian neural network tutorial for details.
High-level libraries such as Keras and TensorFlow Slim can be used to easily construct deep neural networks. We illustrate this with a deep generative model over binary data \(\{\mathbf{x}_n\}\in\{0,1\}^{N\times 28*28}\).
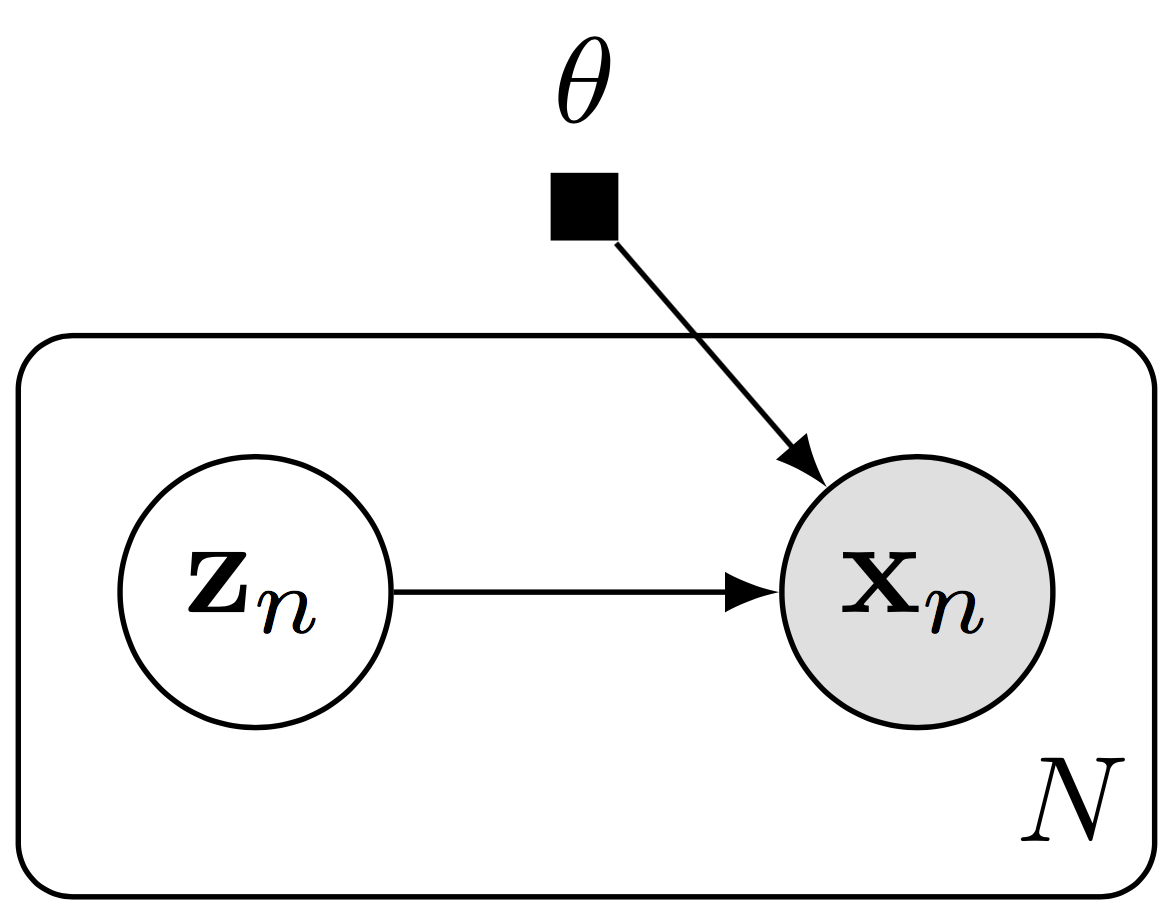
Graphical representation of a deep generative model.
The model specifies a generative process where for each \(n=1,\ldots,N\), \[\begin{aligned} \mathbf{z}_n &\sim \text{Normal}(\mathbf{z}_n \mid \mathbf{0}, \mathbf{I}), \\[1.5ex] \mathbf{x}_n\mid \mathbf{z}_n &\sim \text{Bernoulli}(\mathbf{x}_n\mid p=\mathrm{NN}(\mathbf{z}_n; \mathbf{\theta})).\end{aligned}\] The latent space is \(\mathbf{z}_n\in\mathbb{R}^d\) and the likelihood is parameterized by a neural network \(\mathrm{NN}\) with parameters \(\theta\). We will use a two-layer neural network with a fully connected hidden layer of 256 units (with ReLU activation) and whose output is \(28*28\)-dimensional. The output will be unconstrained, parameterizing the logits of the Bernoulli likelihood.
With TensorFlow Slim, we write this model as follows:
from edward.models import Bernoulli, Normal
from tensorflow.contrib import slim
z = Normal(loc=tf.zeros([N, d]), scale=tf.ones([N, d]))
h = slim.fully_connected(z, 256)
x = Bernoulli(logits=slim.fully_connected(h, 28 * 28, activation_fn=None))With Keras, we write this model as follows:
from edward.models import Bernoulli, Normal
from keras.layers import Dense
z = Normal(loc=tf.zeros([N, d]), scale=tf.ones([N, d]))
h = Dense(256, activation='relu')(z)
x = Bernoulli(logits=Dense(28 * 28)(h))Keras and TensorFlow Slim automatically manage TensorFlow variables, which serve as parameters of the high-level neural network layers. This saves the trouble of having to manage them manually. However, note that neural network parameters defined this way always serve as model parameters. That is, the parameters are not exposed to the user so we cannot be Bayesian about them with prior distributions.
Bayesian Nonparametrics
Bayesian nonparametrics enable rich probability models by working over an infinite-dimensional parameter space (Hjort, Holmes, Müller, & Walker, 2010). Edward supports the two typical approaches to handling these models: collapsing the infinite-dimensional space and lazily defining the infinite-dimensional space.
In the collapsed approach, we specify a distribution over its instantiation, and the stochastic process is implicitly marginalized out. For example, we can represent a distribution over the function evaluations of a Gaussian process, and not explicitly represent the function draw.
from edward.models import Bernoulli, Normal
def kernel(X):
"""Evaluate kernel over each pair of rows (data points) in the matrix."""
return
X = tf.placeholder(tf.float32, [N, D])
y = MultivariateNormalTriL(loc=tf.zeros(N), scale_tril=kernel(X))For more details, see the Gaussian process classification tutorial. This approach is also useful for Poisson process models.
In the lazy approach, we work directly on the infinite-dimensional space via control flow operations in TensorFlow. At runtime, the control flow will execute only the necessary computation in order to terminate. As an example, Edward provides a DirichletProcess random variable.
import matplotlib.pyplot as plt
from edward.models import DirichletProcess, Normal
def plot_dirichlet_process(alpha):
with tf.Session() as sess:
dp = DirichletProcess(alpha, Normal(0.0, 1.0))
samples = sess.run(dp.sample(1000))
plt.hist(samples, bins=100, range=(-3.0, 3.0))
plt.title("DP({0}, N(0, 1))".format(alpha))
plt.show()
# Dirichlet process with high concentration
plot_dirichlet_process(1.0)
# Dirichlet process with low concentration (more spread out)
plot_dirichlet_process(50.0)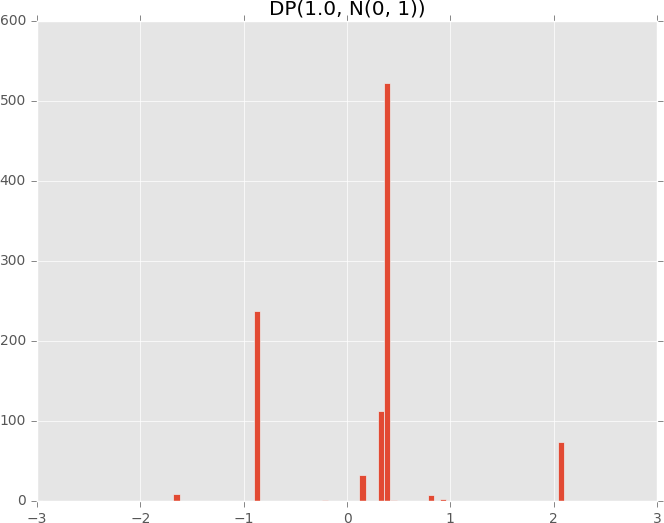
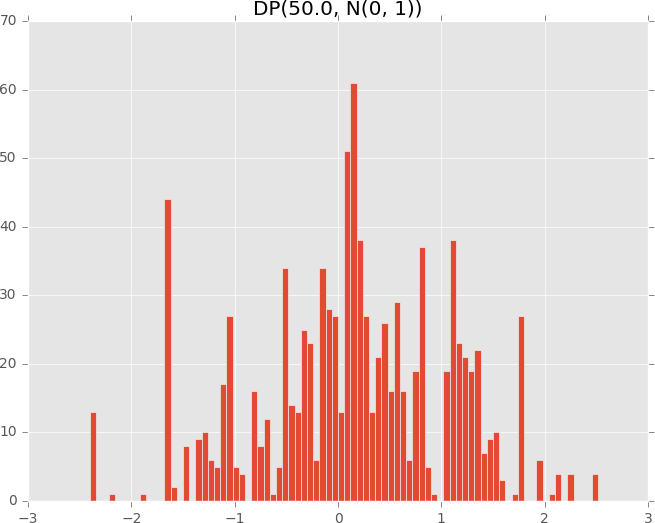
To see the essential component defining the DirichletProcess, see examples/pp_dirichlet_process.py in the Github repository. Its source implementation can be found at edward/models/dirichlet_process.py.
Probabilistic Programs
Probabilistic programs greatly expand the scope of probabilistic models (Goodman, Mansinghka, Roy, Bonawitz, & Tenenbaum, 2012). Formally, Edward is a Turing-complete probabilistic programming language. This means that Edward can represent any computable probability distribution.
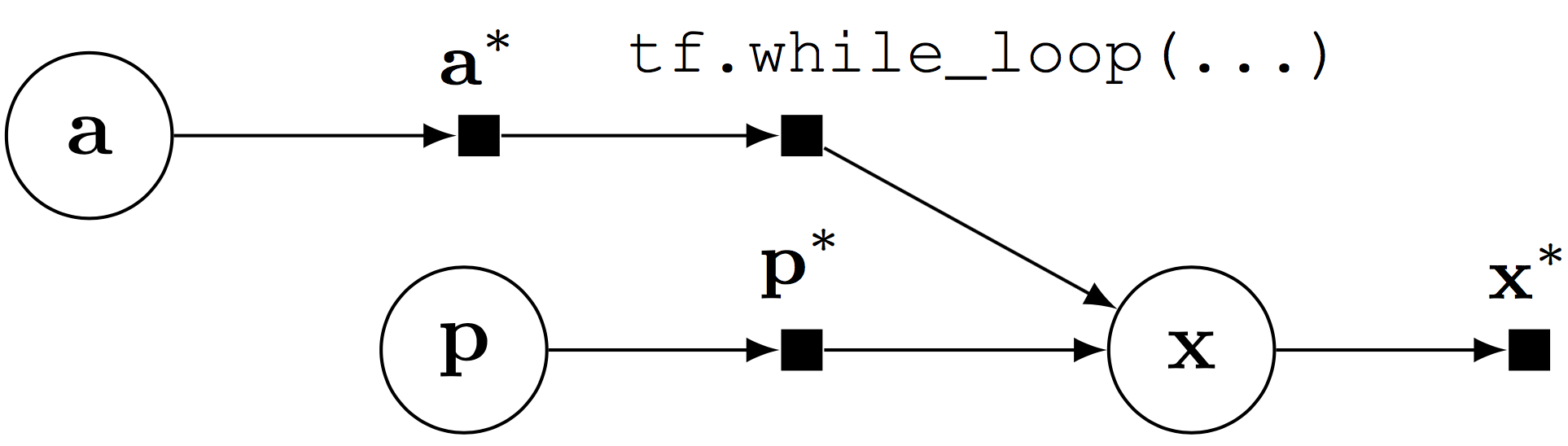
Computational graph for a probabilistic program with stochastic control flow.
Random variables can be composed with control flow operations, enabling probabilistic programs with stochastic control flow. Stochastic control flow defines dynamic conditional dependencies, known in the literature as contingent or existential dependencies (Mansinghka, Selsam, & Perov, 2014; Wu, Li, Russell, & Bodik, 2016). See above, where \(\mathbf{x}\) may or may not depend on \(\mathbf{a}\) for a given execution.
Stochastic control flow produces difficulties for algorithms that leverage the graph structure; the relationship of conditional dependencies changes across execution traces. Importantly, the computational graph provides an elegant way of teasing out static conditional dependence structure (\(\mathbf{p}\)) from dynamic dependence structure (\(\mathbf{a})\). We can perform model parallelism over the static structure with GPUs and batch training, and use generic computations to handle the dynamic structure.
References
Goodman, N., Mansinghka, V., Roy, D. M., Bonawitz, K., & Tenenbaum, J. B. (2012). Church: a language for generative models. In Uncertainty in artificial intelligence.
Hjort, N. L., Holmes, C., Müller, P., & Walker, S. G. (2010). Bayesian nonparametrics (Vol. 28). Cambridge University Press.
Koller, D., & Friedman, N. (2009). Probabilistic graphical models: Principles and techniques. MIT press.
Mansinghka, V., Selsam, D., & Perov, Y. (2014). Venture: A higher-order probabilistic programming platform with programmable inference. arXiv.org.
Neal, R. M. (1990). Learning Stochastic Feedforward Networks.
Rumelhart, D. E., McClelland, J. L., & Group, P. R. (1988). Parallel distributed processing (Vol. 1). IEEE.
Wu, Y., Li, L., Russell, S., & Bodik, R. (2016). Swift: Compiled inference for probabilistic programming languages. arXiv Preprint arXiv:1606.09242.