
Supervised Learning (Regression)
In supervised learning, the task is to infer hidden structure from labeled data, comprised of training examples \(\{(x_n, y_n)\}\). Regression typically means the output \(y\) takes continuous values.
We demonstrate with an example in Edward. An interactive version with Jupyter notebook is available here.
Data
Simulate training and test sets of \(40\) data points. They comprise of pairs of inputs \(\mathbf{x}_n\in\mathbb{R}^{10}\) and outputs \(y_n\in\mathbb{R}\). They have a linear dependence with normally distributed noise.
def build_toy_dataset(N, w, noise_std=0.1):
D = len(w)
x = np.random.randn(N, D)
y = np.dot(x, w) + np.random.normal(0, noise_std, size=N)
return x, y
N = 40 # number of data points
D = 10 # number of features
w_true = np.random.randn(D)
X_train, y_train = build_toy_dataset(N, w_true)
X_test, y_test = build_toy_dataset(N, w_true)Model
Posit the model as Bayesian linear regression (Murphy, 2012). It assumes a linear relationship between the inputs \(\mathbf{x}\in\mathbb{R}^D\) and the outputs \(y\in\mathbb{R}\).
For a set of \(N\) data points \((\mathbf{X},\mathbf{y})=\{(\mathbf{x}_n, y_n)\}\), the model posits the following distributions: \[\begin{aligned} p(\mathbf{w}) &= \text{Normal}(\mathbf{w} \mid \mathbf{0}, \sigma_w^2\mathbf{I}), \\[1.5ex] p(b) &= \text{Normal}(b \mid 0, \sigma_b^2), \\ p(\mathbf{y} \mid \mathbf{w}, b, \mathbf{X}) &= \prod_{n=1}^N \text{Normal}(y_n \mid \mathbf{x}_n^\top\mathbf{w} + b, \sigma_y^2).\end{aligned}\] The latent variables are the linear model’s weights \(\mathbf{w}\) and intercept \(b\), also known as the bias. Assume \(\sigma_w^2,\sigma_b^2\) are known prior variances and \(\sigma_y^2\) is a known likelihood variance. The mean of the likelihood is given by a linear transformation of the inputs \(\mathbf{x}_n\).
Let’s build the model in Edward, fixing \(\sigma_w,\sigma_b,\sigma_y=1\).
from edward.models import Normal
X = tf.placeholder(tf.float32, [N, D])
w = Normal(loc=tf.zeros(D), scale=tf.ones(D))
b = Normal(loc=tf.zeros(1), scale=tf.ones(1))
y = Normal(loc=ed.dot(X, w) + b, scale=tf.ones(N))Here, we define a placeholder X. During inference, we pass in the value for this placeholder according to data.
Inference
We now turn to inferring the posterior using variational inference. Define the variational model to be a fully factorized normal across the weights.
qw = Normal(loc=tf.get_variable("qw/loc", [D]),
scale=tf.nn.softplus(tf.get_variable("qw/scale", [D])))
qb = Normal(loc=tf.get_variable("qb/loc", [1]),
scale=tf.nn.softplus(tf.get_variable("qb/scale", [1])))Run variational inference with the Kullback-Leibler divergence, using \(250\) iterations and \(5\) latent variable samples in the algorithm.
inference = ed.KLqp({w: qw, b: qb}, data={X: X_train, y: y_train})
inference.run(n_samples=5, n_iter=250)In this case KLqp defaults to minimizing the \(\text{KL}(q\|p)\) divergence measure using the reparameterization gradient. For more details on inference, see the \(\text{KL}(q\|p)\) tutorial.
Criticism
A standard evaluation for regression is to compare prediction accuracy on held-out “testing” data. We do this by first forming the posterior predictive distribution.
y_post = ed.copy(y, {w: qw, b: qb})
# This is equivalent to
# y_post = Normal(loc=ed.dot(X, qw) + qb, scale=tf.ones(N))With this we can evaluate various quantities using predictions from the model (posterior predictive).
print("Mean squared error on test data:")
print(ed.evaluate('mean_squared_error', data={X: X_test, y_post: y_test}))
print("Mean absolute error on test data:")
print(ed.evaluate('mean_absolute_error', data={X: X_test, y_post: y_test}))## Mean squared error on test data:
## 0.0300492
## Mean absolute error on test data:
## 0.123616The trained model makes predictions with low error (relative to the magnitude of the output).
We can also visualize the fit by comparing data generated with the prior to data generated with the posterior (on the first feature dimension).
def visualise(X_data, y_data, w, b, n_samples=10):
w_samples = w.sample(n_samples)[:, 0].eval()
b_samples = b.sample(n_samples).eval()
plt.scatter(X_data[:, 0], y_data)
inputs = np.linspace(-8, 8, num=400)
for ns in range(n_samples):
output = inputs * w_samples[ns] + b_samples[ns]
plt.plot(inputs, output)# Visualize samples from the prior.
visualise(X_train, y_train, w, b)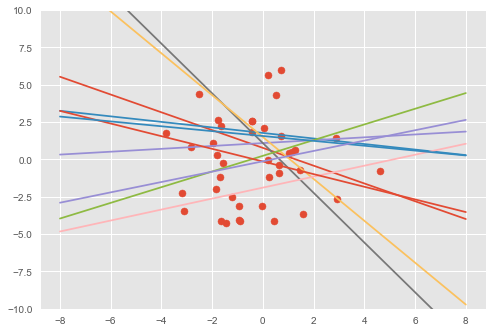
# Visualize samples from the posterior.
visualise(X_train, y_train, qw, qb)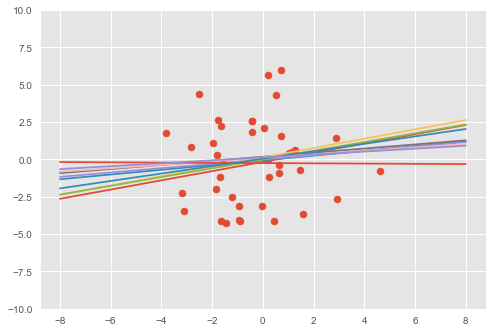
The model has learned a linear relationship between the first dimension of \(\mathbf{x}\in\mathbb{R}^D\) and the outputs \(y\in\mathbb{R}\).
References
Murphy, K. P. (2012). Machine learning: A probabilistic perspective. MIT Press.